| ★ | とある掲示板で電車や電気機関車の話しをしていたらなにやら難しい制御方式の話などが出できました。 で、それらに付いて考えているうちに実は文科系の私は「電気についての知識が無い!!」(中学生の頃少しは習ったはずなのに全て何処かへ行ってしまっている!!)という事に気づきました。 そこで、改めて勉強してみたのですが・・・。 |
仮修正のお知らせ
VVVF三相交流インバータ制御PWM方式
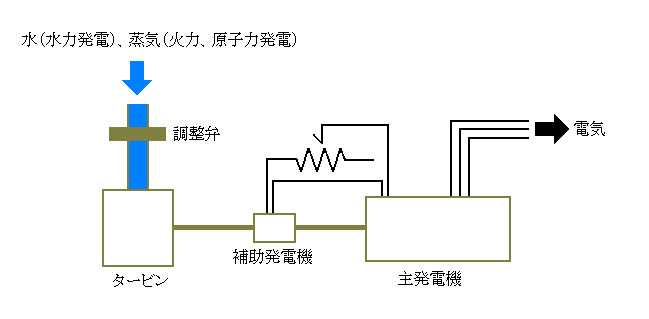
その調整には補助発電機と主発電機を結ぶ回路の途中に抵抗器を入れておき、この抵抗値を変える事により行われます。
少ない出力の場合は抵抗値を増やして少ない電流を、その逆であれば抵抗を減らして多い電流を流し、主発電機の回転子の磁力を変えてやるのです
その回転数の調整は水または蒸気を送り込む部分にある調整弁(調速機)で行います。
回転数は発電機によって違いますが毎分125~750回です。
発電出力を変えた時には主発電機が必要とする力が急激に変わって勢いづいて回転が高まったり、負荷がかかって回転が落ちたりします。その様な場合でもすぐに適正回転数にできる機能を備えています。
目次へ戻る
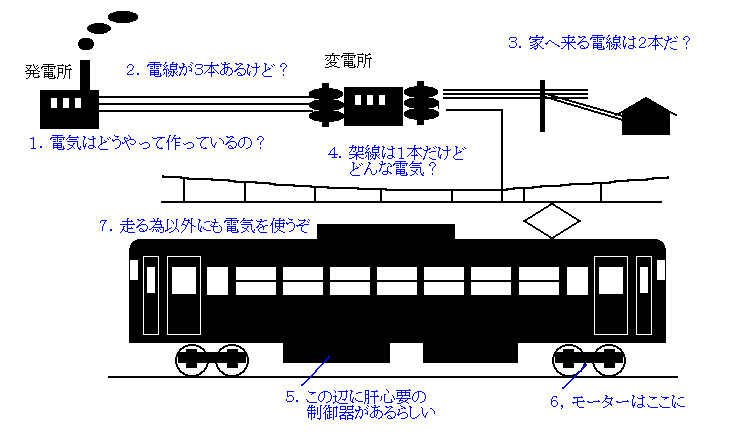
2.電線が3本あるけど?
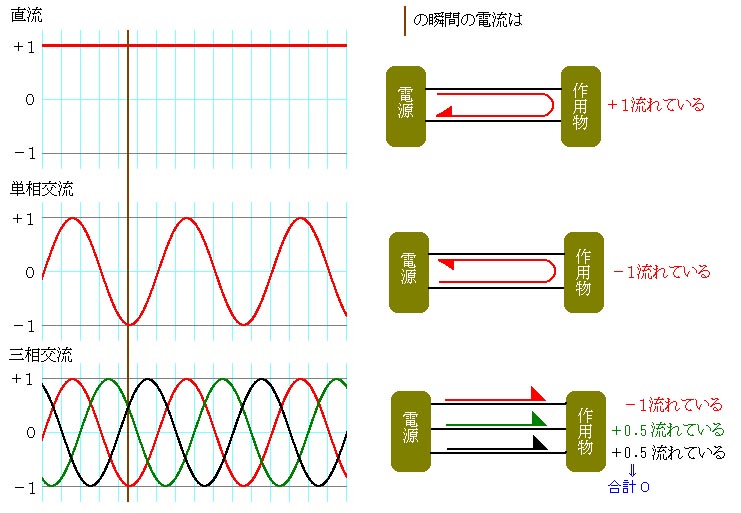
しかし、町中に発電所があり近所に配電するだけなら良かったのですが、次第に遠方まで電気を送るようになると不都合が生じて来ました。
直流電気は送電中の損失が大きく遠くまで送るには不向きだったのです。
遠くまで電気を送りたい場合は送る電圧を上げてやれば良いのですが、直流電気は電圧を変える事ができない(できなかった)ので利用段階で適正な電圧を得る事ができません。そこでより使い勝手の良い交流電気が使われるようになりました。
 倍になるそうです。(この辺よく解りません)
倍になるそうです。(この辺よく解りません)
目次へ戻る
3.家へ来る電線は2本だ?
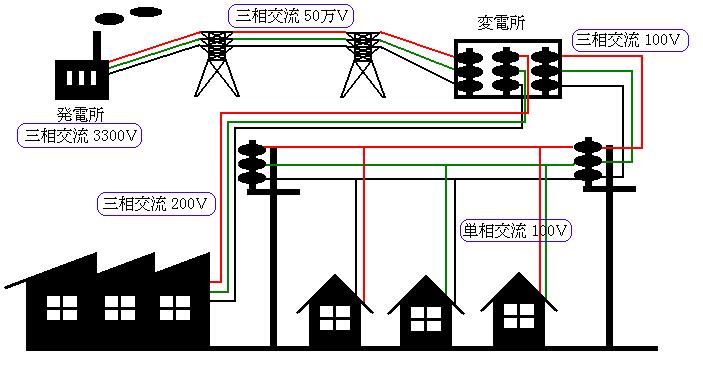
電力(W)、電圧(V)、電流(A)の関係はW=V×Aです。
ですから仮に100万KWの電気を送るとすると、50万Vであれば流れる電流は2KAですが、
5万Vだと20KAもの電流が流れ電線が焼ききれてしまう恐れが有ります。
目次へ戻る
4.架線は1本だけどどんな電気?
5.この辺に肝心要の制御器があるらしい
また実際に架線を見ただけでは区別がつきにくいですが踏切などに「高電圧20000V注意」などと書かれている場合もありますので一度よく探してみてください。
その見えない電線とは線路です。
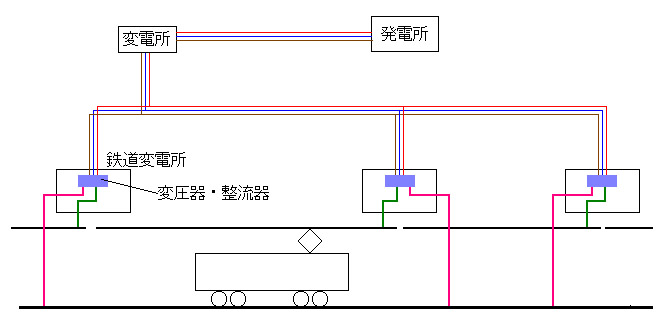
直流は長距離の送電に不向きな為10km毎ぐらいに変電所が必要となります。
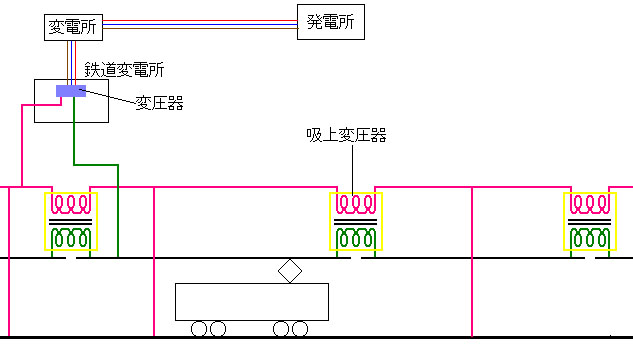
交流は長距離送電が可能な為、変電所は30km毎ぐらいで済みます。しかし、交流区間では電圧が高い為に単にレールを使って電気を戻したのでは付近で電磁誘導による電波障害が起こる為に、架線近くに帰りの電線(き電線)を張り、更にレールから電気が大地に逃げない様に吸い上げ変圧器(BT:ブースター)で強制的に戻してやる必要があり、そのBTを3km毎ぐらいに設置しなければなりません。
これは架線及びき電線に倍の電圧を流しておき、レールから戻される電気は、架線とき電線を結ぶ様に設けられた単巻変圧器(AT) の中間に戻され規定電圧を得る(変圧器のコイルの中間につながっているので半分の電圧になる)ことができます。
更に送電電圧が高いので変電所も100km毎くらいで済み、ブースターセクションも不用となります。
また、列車が高速になって架線の弛みにパンタグラフがついていけず離れてしまった場合(離線)にもアークが起こります。
アークは架線とパンタグラフを痛めますのでこれを防ぐ為に編成中にある数個のパンタグラフを電気的に結んでおいて、例え離線しても電位差ができない様にする等の工夫がされています。
ただし、トロリーバス(これも分類上は鉄道です)では2本の架線を張りそれぞれにポールを伸ばして集電、帰電を行っています。
電線にとまっている鳥が感電しないのと同じで、レールと大地の間には電位差が無いので感電しないのです。
しかし、そのままですと動力用電気も変電所に帰る事ができませんので、この絶縁部分には特別な回路が組み込まれ、動力用電気のみが通れるようになっています。
目次へ戻る
6.モーターはここに
モーターの回転数は主に電圧によって変わります。しかしそれだけで回転数が決まる訳ではありません。それに加えて負荷や電流の周波数等が影響した結果が回転数となります。
電圧を高くすれば高速、低くすれば低速。電流を多くすれば高出力、少なくすれば低出力。周波数を高くすれば高速、低くすれば低速。列車の重さや線路の勾配。スムーズな加速。・・・。
と、これらのいろいろと面倒な事を引き受けているのが制御器です。
電車、電気機関車で使われている制御器には様々な方式があります。
抵抗を電気が通ると電流の一部が熱エネルギーとなって逃げて電流量が減ります。また抵抗の前後では抵抗に依る電圧降下が起って、電圧も下がります。
電車の抵抗器はこの抵抗を数個もっていてそれを直列につなぐ事によって全体としての抵抗値を変えモーターの回転数を制御します。

抵抗器による制御は、走り始めは全ての抵抗をつないで抵抗を大きくしてゆっくりとモーターを回し始め(①)、次第に2→3→4とスイッチを切り替えて抵抗値を減らし、最後には抵抗を介さずに全ての電流をモーターへと流して高速回転を得ます。
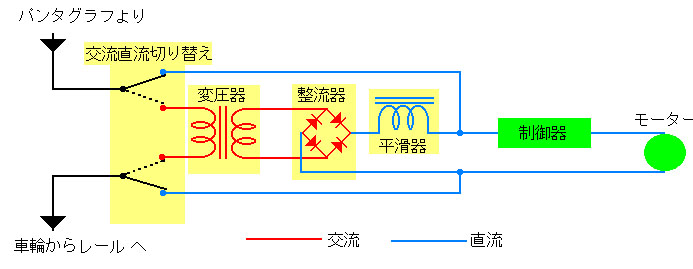
直流専用電車には、交流直流切り替え、変圧器、整流器、平滑器がありません。
交流専用電車では交流直流切り替えがありません。
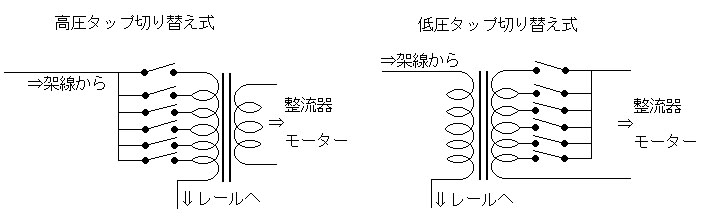
タップの切り替えを入力側(1次巻線側)で行う高圧タップ切り替え式と出力側(2次巻線側)で行う低圧タップ切り替え式の2種類があります。
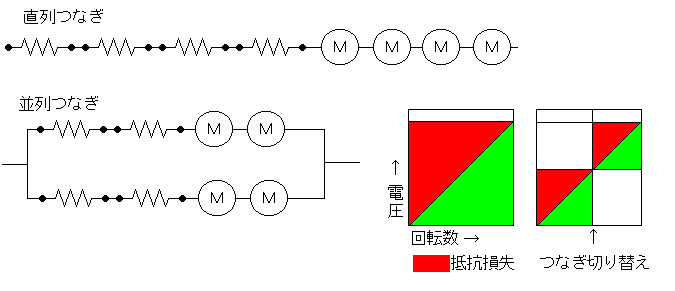
モーターを2個並列につないだままでは合計定格が1500Vなので発進時には架線からの1500V電圧の電気の大部分を抵抗で損失してしまいます。
しかし、直列につなぐと合計定格は3000Vとなり、1500Vの電圧では半分の回転しか得られません。
元々半分の回転数が限度のものを制御するので抵抗で無駄にしてしまう分も半分で済みます。
直列つなぎで限界まで加速したら(抵抗を0にまで)回路を組替えて並列つなぎにし、高速域での制御に移ります。
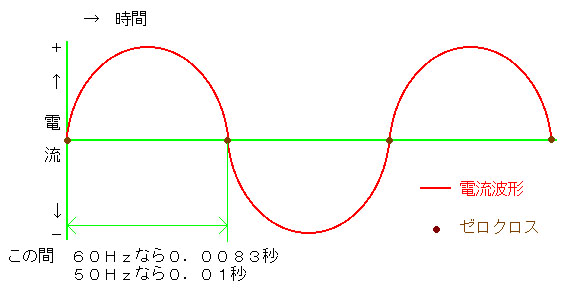
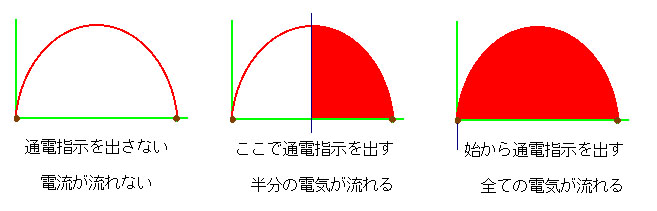
例えば、50ヘルツの場合、ゼロクロスを検知した0.005秒後に指示を出せば半分の出力、0.0025秒後に指示を出せば約75%の出力となりこれによってモーターの回転速度が制御できます。
これをゼロクロス毎に繰り返せば、一定の時間で指示していれば一定の速度で、だんだんと指示する時間を早くしていけば加速となるのです。
この制御方式ではモーターを低速で回転させても、回転に必要な電力以外の部分はスイッチを切って電気を流さない様にしている為、抵抗制御の様に熱損失してしまうような電力の無駄がありません。
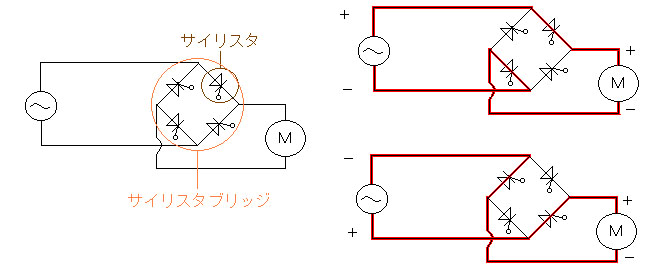
しかし、サイリスタは電気を一方通行にしか使えない為、1つでは交流波の半分は通す事が出来ません。
そこでサイリスタを4個使ってどちら向きの電気でも通せる様にすると共にモーターへ供給する電気を直流に変換する事も行っています。
これをサイリスタブリッジと言い、速度制御と共に整流器としての役割も果たします。
界磁とはモーターのカバー側に付いている磁力を発生させる部分で、回転子コイルは回転軸についています。
モーターは逆起電力というモーターの回転を止めようとする力に打ち勝つパワーを回転子に与える事により回転を始めます。
界磁制御においては界磁のパワーを落とす事によって逆起電力を弱くし回転速度を上げるということが行われているのです。
これを界磁添加励磁制御と言います。
励磁とは、電流を流して磁力を発生させる、という意味で、この方式を使うためにはモーターそのものに界磁の電流を別に制御できる様に別回路を設けなければなりません。
この方式は、界磁を弱めてしまうのでモーター自体の出力も弱くなり、また、あまり大きな制御が得られないので、単独で使われることは無く、抵抗制御等と合わせて使用されます。
電車に設定されている最高速度まで抵抗制御を行うと、それ以下の速度では常に抵抗器で電力を損失している状態になり、経済的ではありません。
そこで、抵抗制御での最高速度をある程度のところで抑えておいて(抵抗を使わずに全ての電流がモーターへ流れる状態)、それ以上に速度を上げたいときに界磁添加励磁制御(弱め界磁)を使い速度を上げます。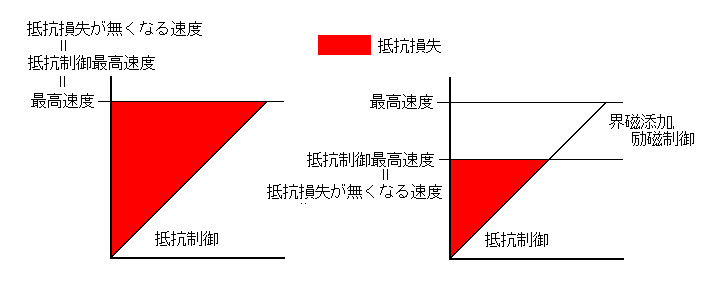
しかし、後に、界磁に流れる電流をサイリスタで制御し電力損失を極力無くした方式、界磁チョッパ制御が使われる様になりました。
また、抵抗制御の後に使うだけでなく、制御全般に渡って併用されるようになり発進時の衝撃を和らげる効果などを生み出しました。
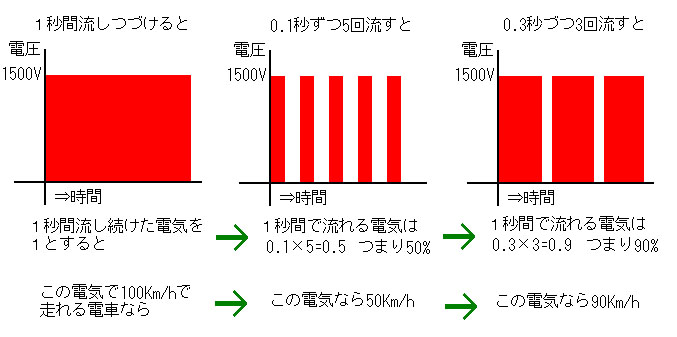
具体的に言えば、ゆっくり走りたい時は、まずスイッチを入れてモーターが回り出したら回転があがらないうちにスイッチを切る。
そのままでは止まってしまうので回転が下がらないうちにスイッチを入れる。そして回転が上がらないうちにスイッチを切る。入れる切る入れる切る入れる切る入れる切る入れる切る入れる切る入れる切る・・・・・・。速く走りたい時はスイッチをいれている時間を長くすればするほどモーターの回転数は高くなる・・・。
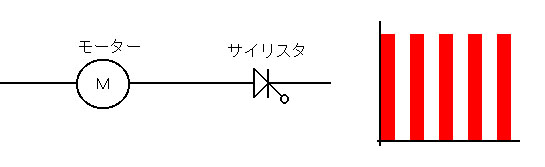
もちろんこの操作は人がやるのではなくサイリスタが行います。
界磁添加励磁制御でもサイリスタを利用した界磁チョッパ制御がありましたが、これに対してモーターへ流す電流そのものをチョッパで制御しようというのが電機子チョッパ制御または単にチョッパ制御と呼ばれるもので、これにより完全に抵抗を使わない制御が行われる様になりました。
そこで、平滑リアクトルとフリーホイルダイオードを組みこんでパルス化した電流をなるべく平坦な直流へと近づける工夫がなされているのが電機子チョッパ制御です。
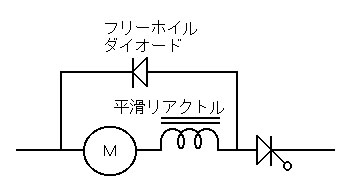
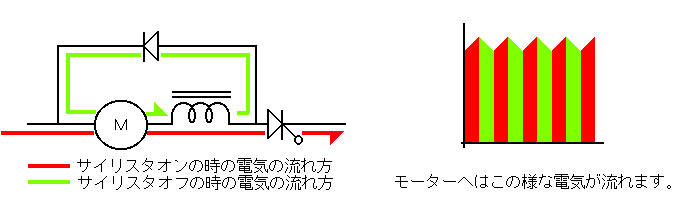
サイリスタがオフになった時は、サイリスタから先の回路が閉ざされてしまう為架線とレール間の電位差が得られず、架線からの電気がモーターへとは流れ込めなくなります。しかしその瞬間、平滑リアクトルが無くなった電圧を補おうとして電流を流す、つまり平滑リアクトルの入口と出口で電位差が発生し、その差によって、平滑リアクトルを出た電流が今度は順方向となったフリーホイルダイオードを通り、モーター、そして平滑リアクトル入口へと流れます。
この様にしてパルス電流をモーターにやさしい平滑電流と直しながら、そのオンオフの時間を調整して制御を行っています。
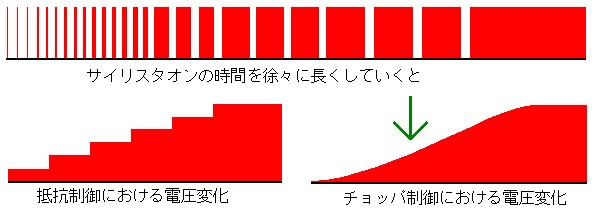
加速時においてはオンオフのタイミングを徐々にオンの時間が長くなるようにしてだんだんとモーターの回転数が上がるようにしています。
そしてこの時にこそ電機子チョッパ制御の2つの利点が現れます。
そのひとつはスムーズな加速。
抵抗制御では電圧を低くする為に抵抗を使いますが、その抵抗は電圧を低くすると共に電流も減らしてしまいます。
すると発進時にはモーターの逆起電力に勝る電流が得られず、その為モーターが起動しうる電流量が得られようにある程度電圧を高くしてやらなければなりません。
つまり、モーターが回転を始める時には電圧がジワッとモーターを回すには高すぎる状態になってしまっています。
これは実際の乗り心地にすると、ガクンと発車するという事になります。
さらにその後の加速時においても抵抗制御では段階的に電圧を上げて行くので、そのたびにガクンと来るのです。
ところが電機子チョッパ制御ではサイリスタの働きにより、電圧だけを制御できるので、電流は始めからモーターを回せる分を流しておく事が出来ます。その事によって、走り始めはシワッとモーターを回転させる事が出来、更にその後の加速においても、無段階でモーターの回転数調整ができるためショックの無い加速ができるのです。
もうひとつの利点は省エネ。
抵抗制御では低速時においてモーターで使う分以外の電気は抵抗で熱に変えてしまっています。つまり無駄づかいです。
しかし、電機子チョッパ制御ではモーターを回すのに必要な電気だけを架線から取り入れています。つまり余分に電気を使わないのです。
チョッパ回路においてはサイリスタがオフの時迂回回路に電流が流れます。そしてその制御のしかたから、低速時はオフの時間が長く高速時にはオフの時間が短い、つまり低速時は迂回回路に多くの電流が流れ、高速時には少なくなる。
この性質をうまく利用して界磁添加励磁制御と組み合わせたのがAVFチョッパ制御です。
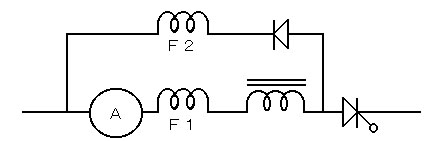
これによりサイリスタがオンの時はAとF1に、オフの時にはAとF1とF2に電流が流れます。
低速時にはオフの時間が長いので界磁のF1とF2の両方に電流の流れる時間が長くなりますが、高速になればなるほどオフの時間が短くなり、よってF2の界磁が作用する時間も短くなる、つまり弱め界磁となるのです。
高周波分巻チョッパは回転子への電圧を制御するチョッパ装置の他に、界磁専用のチョッパ装置を設けた物で、よりきめ細やかな界磁制御ができるようになりました。
前述までの制御方式においてはモーターの回転速度調整のみを記して、モーターのもう1つの動き、回転方向制御についてはふれておりませんでした。これはモーターの回転方向を変える装置が制御器とは別物だったからです。
モーターの回転方向を変えるには界磁に流れる電流の向きを変えてやります。これまでの制御方式においてはそれは別に切り替えスイッチを設けてある物でした。
しかし、高周波分巻チョッパ制御においてはその回転方向をも一緒に制御しています。
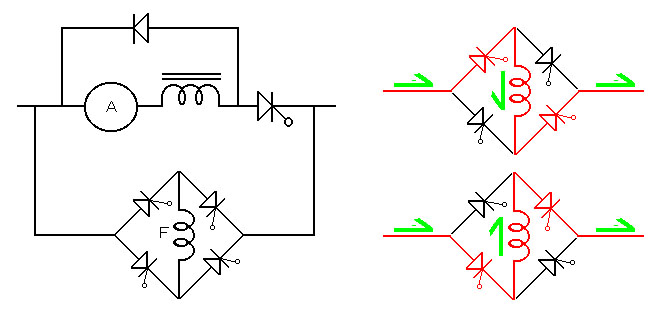
高周波分巻チョッパ制御では回転子(A)へ電気を送る回路と界磁(F)への回路は全く別の物になります。
回転子へのチョッパ回路の働きは他のチョッパ制御と同じです。界磁制御用チョッパ装置は4つのサイリスタによるブリッジとなっており、向かい合ったサイリスタどうしを1組として、そのペアの選択により界磁へ流れる電流の向きを変え、更にそのオンオフのタイミングを変える事で界磁に流れる電圧を制御し全界磁から弱め界磁までの制御も同時に行います。
この方式は、前進、後進、加速、減速の4つの動きを1つのチョッパ装置で行える事から4象限チョッパ制御とも呼ばれます。
鉄道車両のモーターは長らく直流モーターが使われていました。
それは直流モーターが回転数、回転方向の制御に適していたからです。
しかし、その直流モーターの最大の欠点がメンテナンスに手間がかかるという事でした。
直流モーターでは回転子に電気を流してやる必要があるのですが、この回転子が電気を受ける部分(コミューター)は多くの絶縁部分を有するのにもかかわらず、高速でこすれ合うため電気を伝える部分(ブラシ)が磨耗して出る汚れで絶縁不良を起したり、コミューターそのものが精密な部品の寄せ集めの為超高速回転には耐えらない、というネックがありました。
その一方でモーターの種類には、回転子に電流を流さず界磁に発生する磁力を利用して回転子コイルに電気を起し回転させる、という誘導モーターがあります。しかし、このモーターは制御が難しく鉄道車両では使えない物でした。
誘導モーターが使えればメンテナンスの手間は大幅に少なくなりますし列車のスピードアップを図る事もできます。そこで長年の研究の結果それを可能にしたのがインバータ制御なのです。鉄道の場合は三相交流誘導モーターをVVVFインバータをもってして制御する事ができるようになり、「のぞみ」などの超高速列車を走らせる事ができるようになりました。
インバータでの直流から交流に変換する方法は簡単に言えば、+と-を入れ換えるスイッチを高速で作動させる、と言う事です。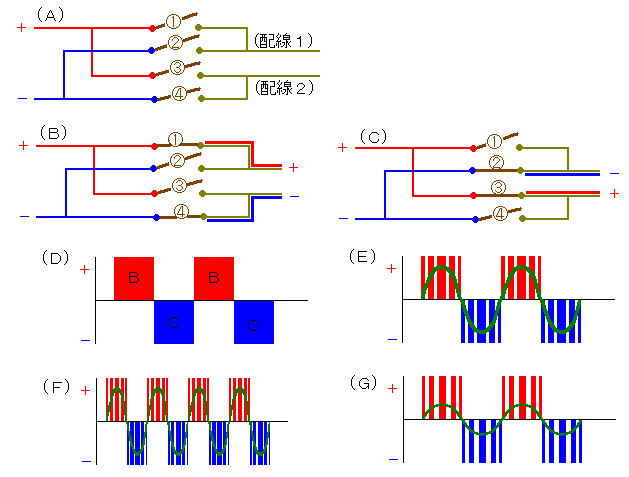
(A)の様に4個のスイッチを取付けます。
まず1と4のスイッチをオンに、2と3のスイッチをオフにします(B)。次に1と4をオフにして2と3をオンにします(C)。
これを繰り返すと配線1には(D)の様に交互に入れ替わる電気が流れます。
しかし、このままですと極端な脈流になる為、それぞれのスイッチのオンオフを駆使してチョッパ制御同様に細かなパルス出力とし、滑らかな交流波になる様にします。(E)
また、周波数を高くするには大きな波の幅を狭く(F)、電圧を低くするには細かなパルスの幅を狭く(G)します。
この様に電流の変換を行うのがインバータです。
なお、この様に2組のスイッチ切り換えタイミングを合わせると単相交流への変換となりますが、鉄道の場合は三相交流への変換を行っておりその方式はもう少しややこしいものになります。
三相交流インバータ制御では6個のスイッチを必要とします。

UV間の電圧に関して見てみると、
スイッチの状態が
の4パターンがあり、そのオンオフのタイミングでいろいろなパターンのパルスが発生します。
その時
Aの様にUからのパルスだけが発生しているとそのパルスはU→モーター→V→SV2→Gへと流れ、
Bの様にUV両方からパルスが発生している時はSU2、SV2ともにOFFの為UV間に電位差が発生せず
Cの様にUV両方からパルスが出ていない時も同様にUV間に電圧が発生せず
Dの様にVだけからパルスが発生している時はV→モーター→U→SU2→Gへと流れます。
よって、これをUV間の電圧で考えると、BとCの時電圧は発生せず、AとDの時電圧がパルスで発生して、しかもDではAと逆方向に流れます。
このパルスの平均を見ると図のような交流波形になり、単相交流インバータの例同様にパルスの幅やタイミングを変えることにより電圧と周波数を制御します。
VW、WU間でも同様の事が行われ、三相交流を発生させます。
この様にパルスによって電圧、周波数を変える方法をPWM方式(Pulse Width Modulation)と言います。
更に、周波数を上げる(モーターの回転数が上がる)とパルスの幅が細くなる訳ですが、あまりにも細すぎると具合が悪い為、1つの波の中のパルスの数を減らす、という事も行います。これにより段階的に高さの変わる音が発生します。
なお、スイッチにはGTOサイリスタやIGBTの半導体が使われます。
7.走る為以外にも電気を使うぞ